Apollo掉头规划:探索未来的交通革命
浏览量: 次 发布日期:2023-11-02 09:19:29
在自动驾驶中,路径规划是非常重要的一环。Apollo掉头规划是指在自动驾驶过程中,根据当前车辆的位置、速度、交通状况等信息,计算出一条安全的掉头路径,并控制车辆完成掉头动作。
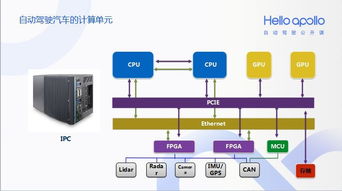
在Apollo掉头规划中,首先需要获取车辆周围的信息,包括车辆的位置、速度、行驶方向等。这些信息可以通过传感器获取,例如激光雷达、摄像头、GPS等。
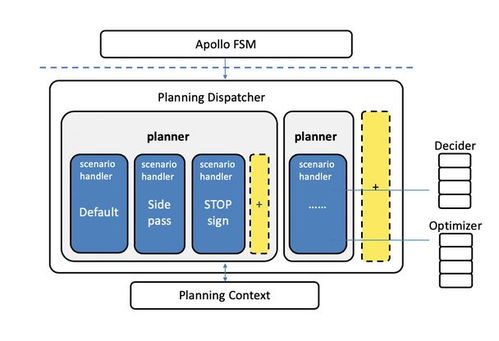
接下来,需要对获取的信息进行分析和处理。Apollo会根据车辆的位置和行驶方向,以及周围的交通状况,计算出一条安全的掉头路径。这个过程需要考虑多种因素,例如道路宽度、车道线、对向车流、行人等。
Apollo会控制车辆按照计算出的路径进行掉头。这个过程需要配合车辆的控制系统,确保车辆能够按照预定的路径进行行驶,并在必要时进行避让或减速等操作。
Apollo掉头规划是一种基于全局路径规划的自动驾驶技术,它能够根据车辆的实际情况和周围交通状况,计算出一条安全的掉头路径,并控制车辆完成掉头动作。这种技术对于提高自动驾驶的安全性和效率具有重要意义。
Apollo掉头规划:探索未来的交通革命

随着科技的飞速发展,我们的交通方式也在经历着前所未有的变革。在这个变革中,自动驾驶技术无疑是最引人注目的领域之一。作为自动驾驶技术的重要一环,掉头规划也成为了研究的热点。本文将带你了解Apollo掉头规划的技术原理、应用场景以及未来发展趋势,探索这场交通革命的无限可能。
一、Apollo掉头规划的技术原理
Apollo掉头规划是由自动驾驶平台Apollo推出的新一代掉头规划技术。它基于高精度地图、传感器、定位等模块,通过先进的算法实现对车辆周围环境的感知和判断。在掉头过程中,Apollo掉头规划能够自动识别合适的掉头区域,规划出安全、高效的掉头路径,并控制车辆完成掉头动作。
二、Apollo掉头规划的应用场景
1. 城市道路:在城市道路上,掉头是常见的交通行为之一。由于城市道路通常车流量大、交通复杂,手动进行掉头操作容易引发交通事故。而Apollo掉头规划则能够自动识别合适的掉头区域,规划出安全的掉头路径,提高掉头的安全性和效率。
2. 高速公路:在高速公路上,掉头也是常见的需求。由于高速公路车速较快、车道较窄,掉头操作需要更加的规划和控制。Apollo掉头规划可以通过对高速公路环境的感知和判断,实现安全、高效的掉头操作。
3. 停车场:在停车场中,由于车位紧张、空间有限,掉头操作往往需要花费大量时间。Apollo掉头规划可以通过对停车场的感知和判断,快速找到合适的掉头区域,缩短停车时间,提高停车效率。
三、Apollo掉头规划的未来发展趋势
随着自动驾驶技术的不断发展和普及,掉头规划技术也将迎来更加广阔的发展空间。未来,Apollo掉头规划将会结合更多的传感器和算法,实现对车辆周围环境更加的感知和判断。同时,掉头规划也将应用于更多的场景,包括无人配送、无人公交、无人出租车等。这些应用场景的拓展将进一步推动掉头规划技术的发展和创新。
四、结语
Apollo掉头规划作为自动驾驶技术的重要一环,正在引领着交通方式的革命性变革。通过先进的算法和传感器技术,Apollo掉头规划能够在各种应用场景中实现安全、高效的掉头操作。随着技术的不断发展和创新,我们有理由相信,未来的交通将更加智能、便捷和高效。让我们共同期待这场交通革命的到来!





 QQ客服
QQ客服